and here's a view of the parts
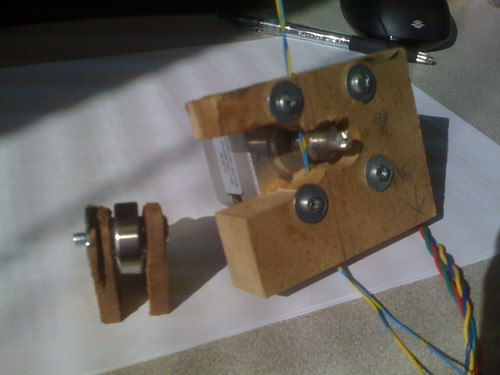
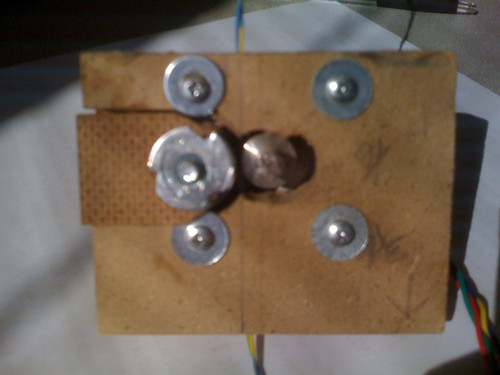
It has the NEMA17 stepper attached to the MDF block. The stepper has an MBI Mk5 drive gear on the shaft. The shaft of the stepper was 5mm I think and the bearing was designed for a 6mm shaft that is on the kysan gearmotor MBI uses so I had to pad out the stepper motor shaft size with some metal tape to get it to be a snug fit for the drive gear. I had to do similar things with the timing belt gear pulleys. The bearing is a standard 608 skate bearing. I'm using a T-nut and a 10-24 screw to hold it between some masonite pieces that slide in the hole of the MDF block. I have to get a few bits from the hardware store to finish things up. I need a spring or some other method of applying pressure to the bearing assembly to drive it into the drive gear. I'm thinking a spring of some sort would do nicely, or a screw mechanism like the paxtruder design. The blue/yellow wire in the picture is where the ABS filament will pass through the extruder. I misplaced the small piece of ABS I was testing with last night, it's probably on the floor of my shop somewhere. So once I get the idler attached, I'll be able to connect the hot end and try it out. Hopefully I can do that tonight. If this works and I can get the machine working, my next task will be to calibrate the machine and then print out upgrades for this extruder. I'm planning on printing up a Wade's and a brutstruder as possible replacements.
If this works, I think I now have everything for the 3d printer. I just have to finish assembling the pieces and get things calibrated. So very close!


